Prototipo de Lanza inteligente junto a YuDesign y la cátedra de Istobal.

Durante el curso de 2021-2022 un grupo de Makers UPV de edades muy diversas realizaron la electrónica y programación de un dispositivo de gestos para el lavado de coches. Este proyecto fue propuesto por el grupo de diseño de Generación Espontánea YuDesign, en colaboración con la cátedra de Istobal.
Formado por David Rodríguez, Andrés Revert, Isabel Fernández y Luis Martinez, además de los supervisores Rafael Carbonell y Javier Poveda, este equipo de Makers lograron desarrollar un prototipo funcional capaz de reconocer gestos de una mano para cambiar los modos de lavado de una estación.
YuDesign propuso el proyecto y aportó el diseño exterior del aparato y las animaciones de la pantalla, mientras que los miembros del equipo de Makers diseñaron la electrónica necesaria para su funcionamiento, montaron el prototipo y lo instalaron en la estación para demostrar su funcionamiento.
Para el desarrollo de este dispositivo se tuvo que tener en cuenta el lugar de su instalación. En una estación de lavado se ha de tener en cuenta la probabilidad de que se moje el producto, por lo que debe de ser resistente al agua. Además, suelen ser ambientes cerrados, por lo que la comunicación puede verse influida por la estructura y distribución de la estación.
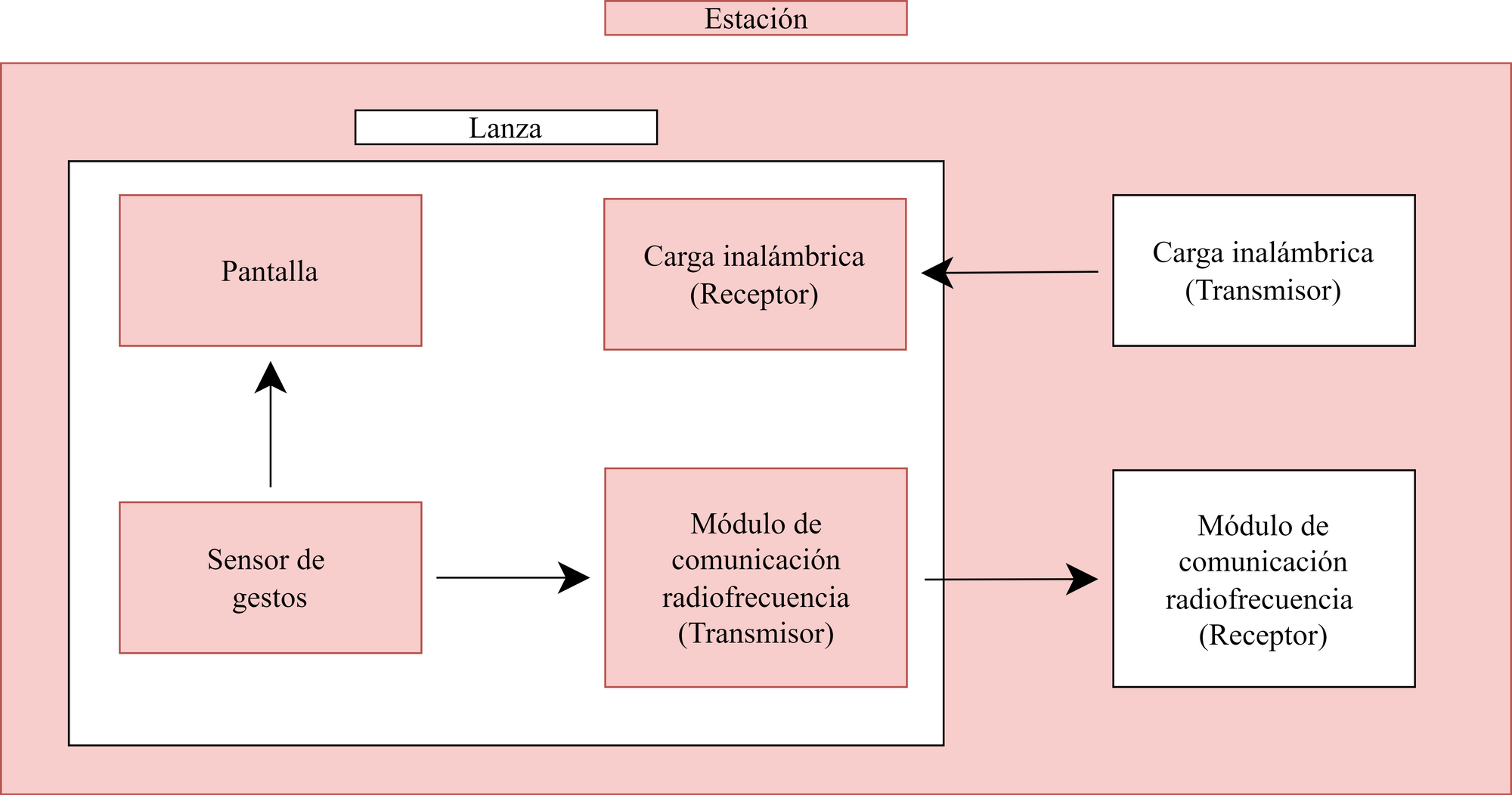
Diagrama de bloques del proyecto
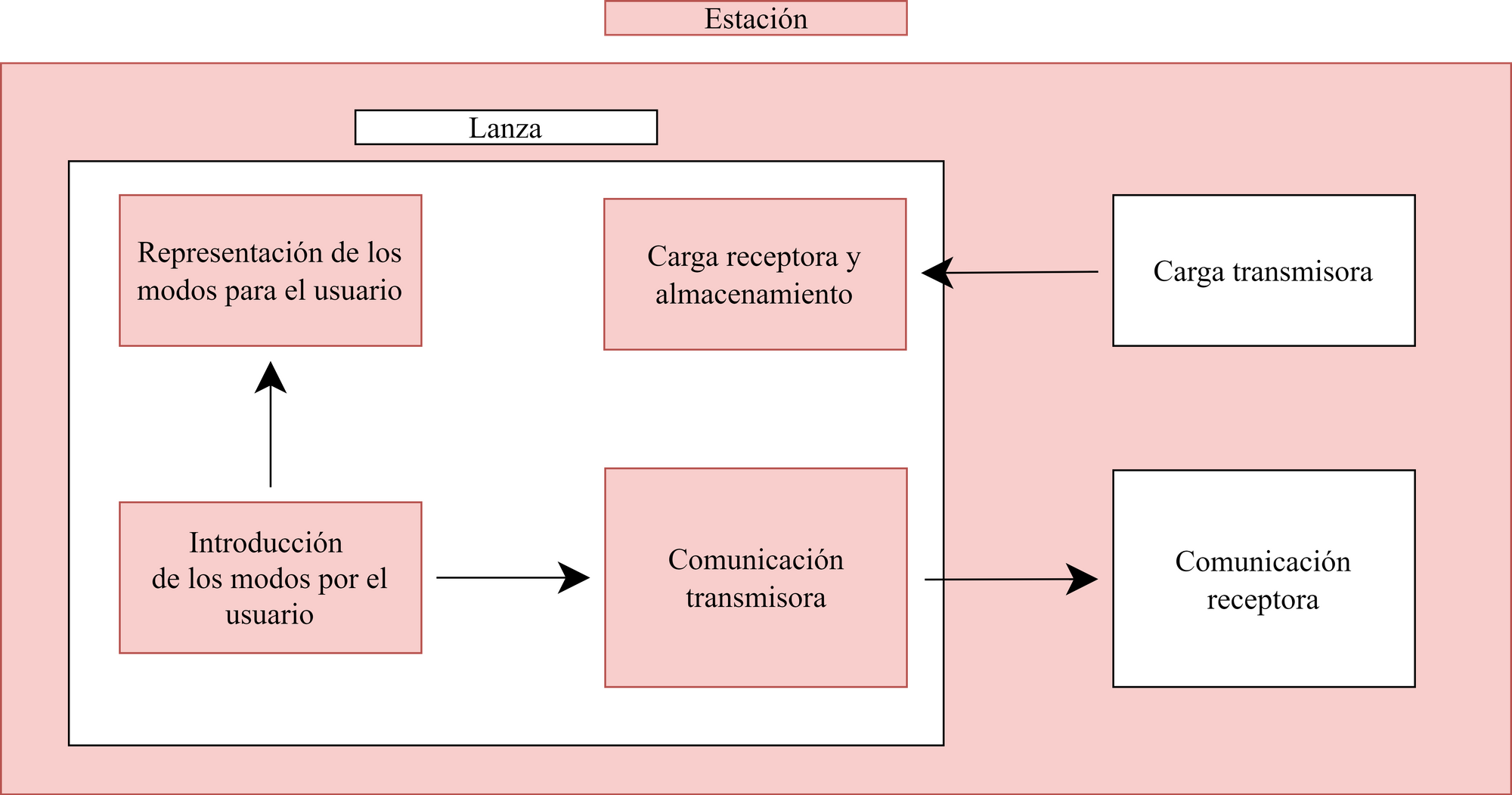
El dispositivo diseñado debía representar los modos de lavado que estaban actualmente siendo realizados en la estación mediante una pantalla instalada en la lanza. Para cambiar los modos de lavado el usuario debe de cambiarlos manualmente mediante un gesto delante del sensor escogido situado en la lanza, sin tener que volver al módulo de lavado. Al cambiarse el modo, se actualizaba la pantalla del dispositivo. La lanza se debía comunicar con la estación por lo que se utilizó un módulo radiofrecuencia y un protocolo de comunicación. Para la alimentación de esta electrónica se utilizó carga inalámbrica.
Alimentación y carga
A la hora de optar por un método de carga se tuvo en cuenta que el dispositivo debía ser resistente al agua, por lo que se eligió una carga inalámbrica. La batería usada era una lipo estándar.
Se estudió el mercado de la carga inalámbrica actual y se utilizó un módulo con la tecnología más adecuada y segura del mercado: el protocolo QI, famosa por su utilización en la carga de los móviles.

Comunicación
La comunicación que tenemos que realizar es reciproca, la lanza enviaría el código para subir o bajar de modo y la estación tiene que devolver el estado en el que se encuentra.
Los módulos de radiofrecuencia pueden mantenerse en comunicación una distancia de 15-30m en espacios cerrados y una distancia de 100m en espacios, contando que será un espacio mixto podemos esperar buenos rendimientos.
El módulo escogido es NRF24L01+, el cual tiene un consumo bajo, trabaja 2,4GHz y es ampliamente utilizado, lo que nos asegura fiabilidad y facilidad a la hora de buscar información.
Para la comunicación entre los módulos se utilizó un protocolo propio específico.
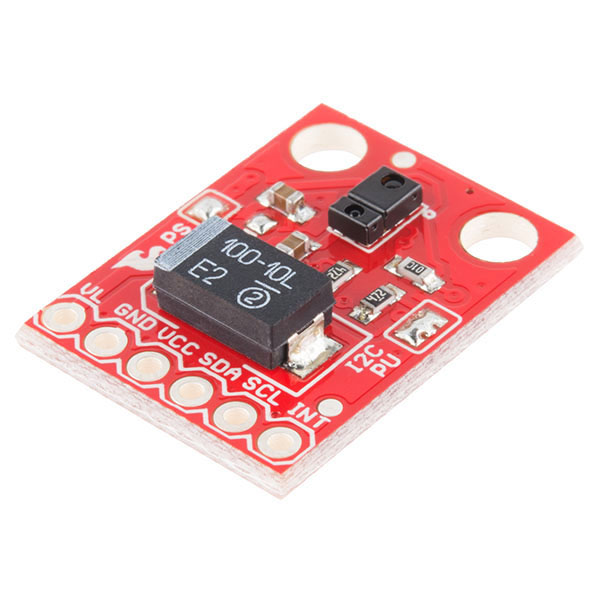
Sensor de gestos
Para el reconocimiento de los gestos se investigó las tecnologías utilizadas en el mercado. Entre ellas se encontraban los infrarrojos.
El sensor utilizado, APDS-9960, lleva incorporados un emisor de infrarrojos y cuatro fotodiodos direccionales.
La detección de gestos se lleva a cabo comparando las variaciones de luz detectadas en cada uno de los cuatro fotodiodos, lo que permite conocer la dirección y sentido del movimiento y distinguir así seis gestos (arriba, abajo, giro a la dirección de las agujas del reloj, giro en dirección contraria a las agujas del reloj, derecha e izquierda). En el proyecto solo se utilizaron los gestos de derecha e izquierda.
Pantalla
La pantalla muestra el modo de limpieza y el tiempo transcurrido junto al coste correspondiente. Cuando el modo es cambiado, la pantalla se actualiza.
Las animaciones y el diseño de la pantalla fueron realizados por YuDesign, y su implementación en el código, su circuito y conexionado por Makers.

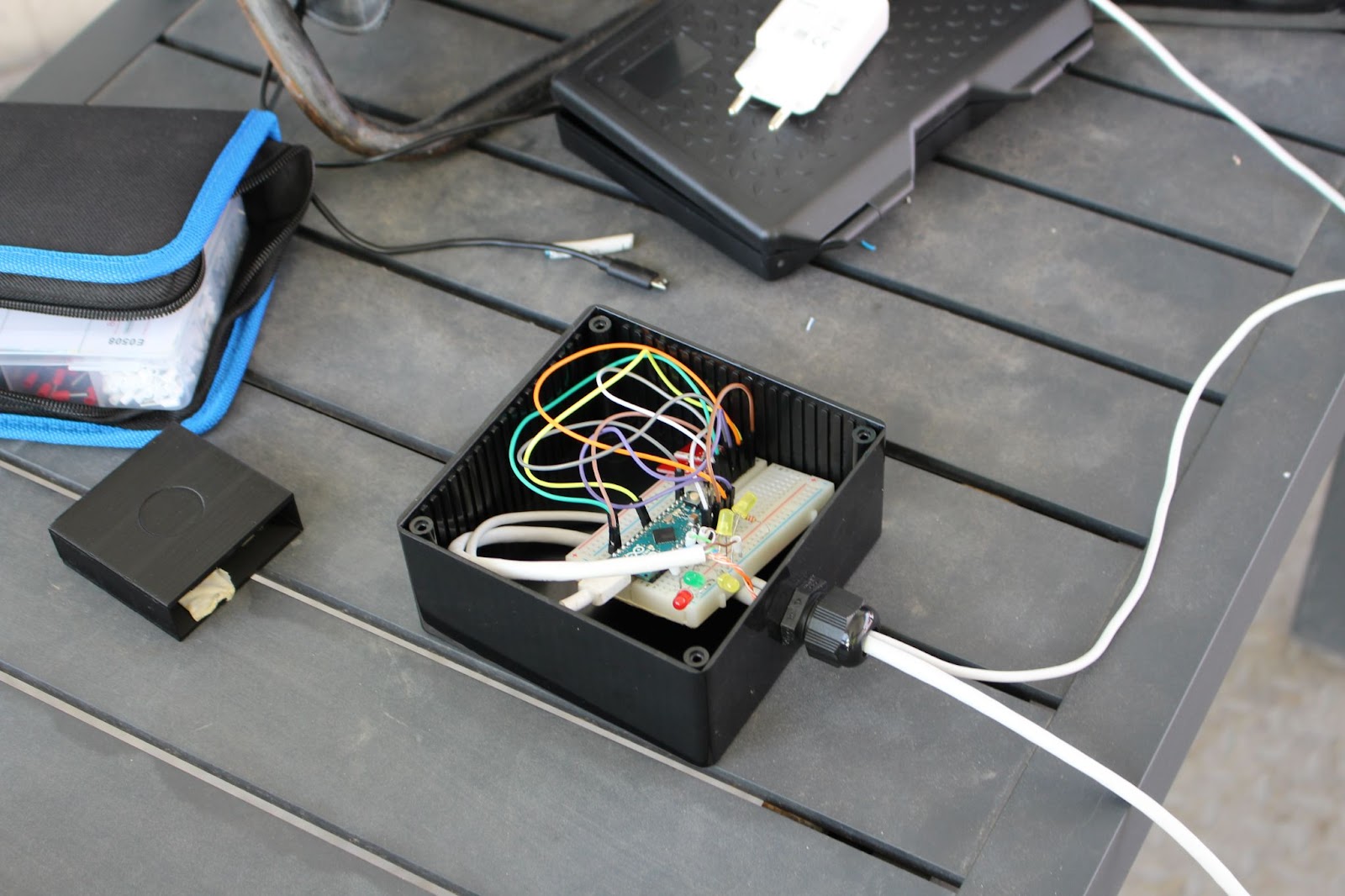
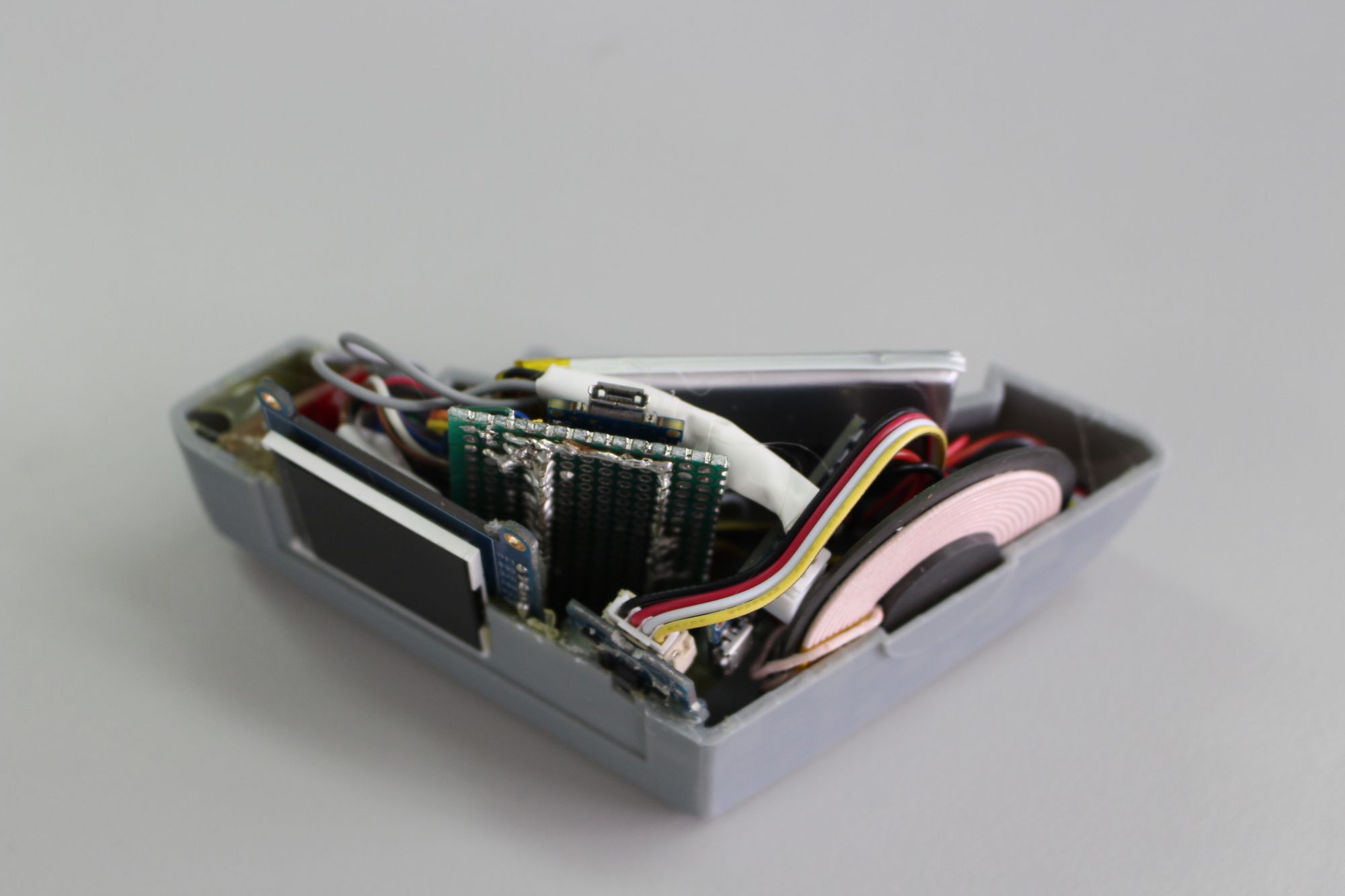
Integración e implementación
La electrónica se gestionó mediante dos Arduinos, uno en el interior del dispositivo integrado en la lanza y otro en la estación, encargado del módulo receptor de comunicación. Se integró la electrónica y se adaptó el código para el funcionamiento de todos los módulos en conjunto.
El diseño electrónico finalizado fue presentado al grupo de YuDesign para que realizara el diseño visual del dispositivo, así como la carcasa exterior y su acoplamiento a la lanza y su tubo.
Con el diseño impreso, se soldaron y conectaron los componentes de tal forma que se adaptaran a la carcasa. Finalmente, el dispositivo estaba completo y en funcionamiento.
Con esto se finaliza uno de los proyectos de 2021, que ha otorgado a dos grupos de Generación la oportunidad de trabajar conjuntamente con la empresa de Istobal y poder aplicar de forma práctica los conocimientos aprendidos en la carrera.
Desde Makers estamos agradecidos por esta oportunidad que se nos ha otorgado y tenemos la intención de seguir colaborando en el futuro.

Para revisar más documentación podeis visitar el Github de MakersUPV así como la Wiki.
Github Lanza Inteligente.Wiki MakersUPV Lanza inteligente